Hatchbed has extensive experience integrating and customizing Lidar based Simultaneous Localization and Mapping (SLAM) solutions for robotic systems.
SLAM is a sophisticated algorithm that enables robots to map their environment while simultaneously determining their location within that map. This dual capability allows robots to navigate in previously unvisited areas and adapt to changes within their surroundings.
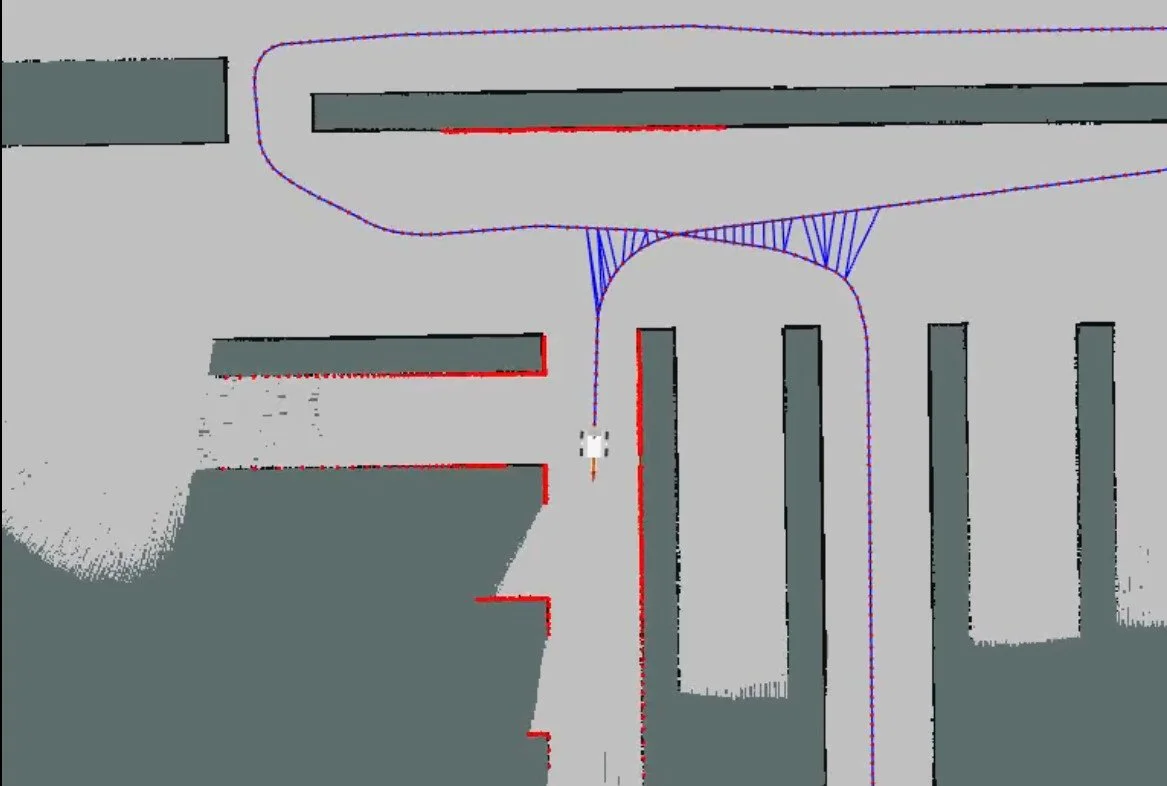
SLAM solutions, using a single plane lidar, can provide an absolute map based position estimate of a robot solution using a single low cost sensor. This approach is especially effective for indoor environments or other environments with flat, uniform surfaces, like paved industrial sites.
In outdoor environments, solutions like SLAM are often needed for supplementing GPS-based localization. This is because GPS reliability is compromised in areas where a clear view of the sky is obstructed, making map-based localization a necessary backup.
SLAM is a mature technology with a long history of academic research and open source implementations. Libraries such as slam_toolbox can be readily integrated into ROS based robotic platforms. However, deploying SLAM in production environments can still pose challenges. Ensuring the accuracy and correctness of loop closure detection is crucial to preventing corruption of the map and localization failure.
Depending on the environment, such issues may be resolved with parameter tuning or might require tailored solutions to take into accound environment specific landmarks using lidar or other sensor modalities. Alternatively, other strategies involving human oversight during the initial map-building phase can be employed, creating a reliable static map that the SLAM algorithm can then use for precise localization.